 京公网安备11010802034965号
京ICP备13020181号-2
京公网安备11010802034965号
京ICP备13020181号-2
《中国塑料》编辑部 ©2008-2024 版权所有
地址:北京市海淀区阜成路11号 邮编:100048
编辑部:010-68985541 联系信箱:cp@plaschina.com.cn
广告部/发行部:010-68985253 本系统由北京玛格泰克科技发展有限公司设计开发

中国塑料 ›› 2023, Vol. 37 ›› Issue (10): 144-152.DOI: 10.19491/j.issn.1001-9278.2023.10.020
• 综述 • 上一篇
俞红锂( ), 刘茜()
), 刘茜()
收稿日期:2023-05-06
出版日期:2023-10-26
发布日期:2023-10-23
通讯作者:
刘茜(1978-),女,副教授,主要研究方向为功能纺织材料,liuqianfangzhi@126.com作者简介:俞红锂(1997-),男,在读硕士研究生,主要研究方向为功能防治材料,yuhl97@126.com
YU Hongli(), LIU Qian()
Received:2023-05-06
Online:2023-10-26
Published:2023-10-23
Contact:
LIU Qian
E-mail:yuhl97@126.com;liuqianfangzhi@126.com
摘要:
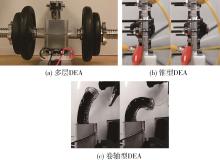
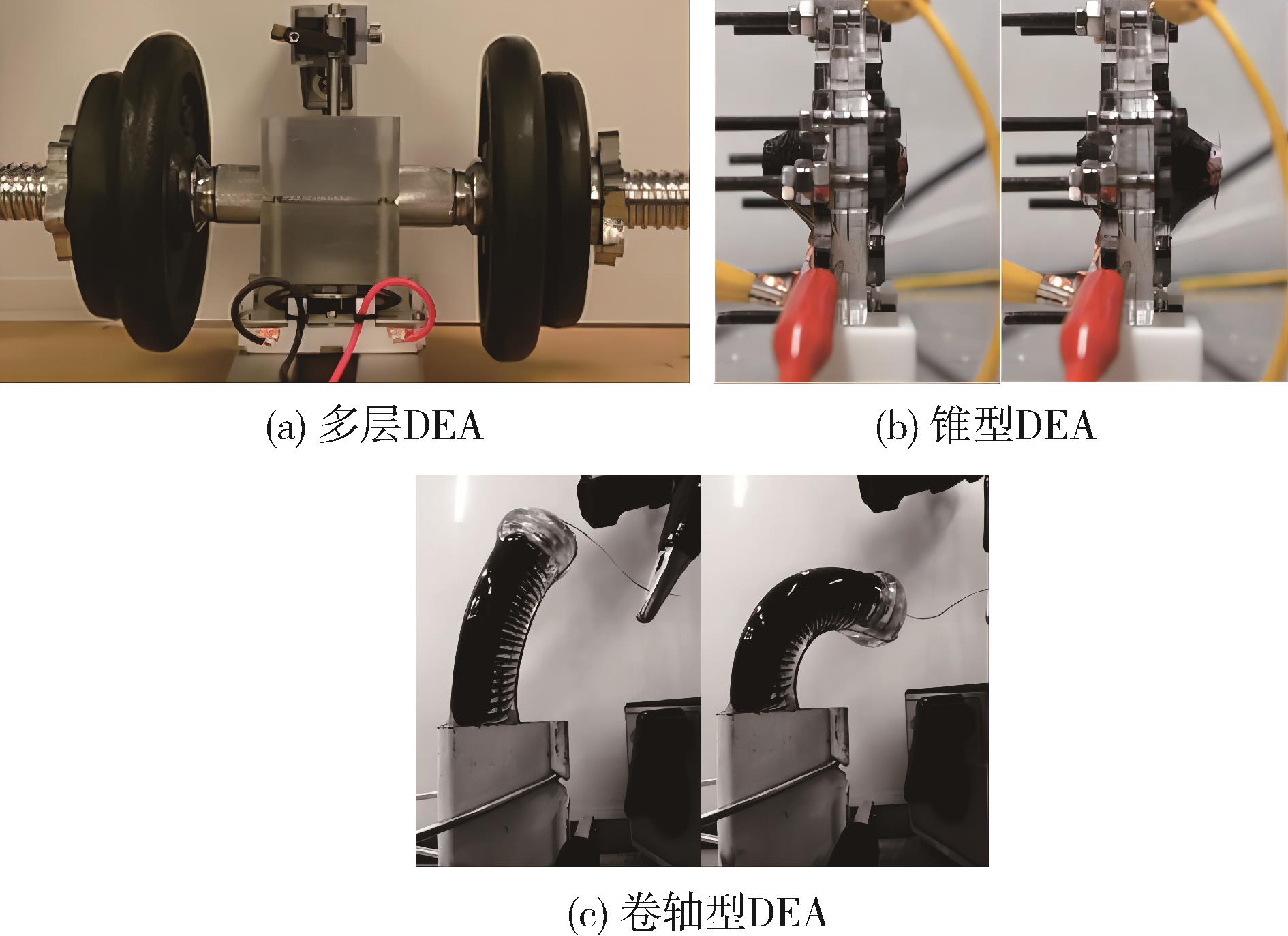
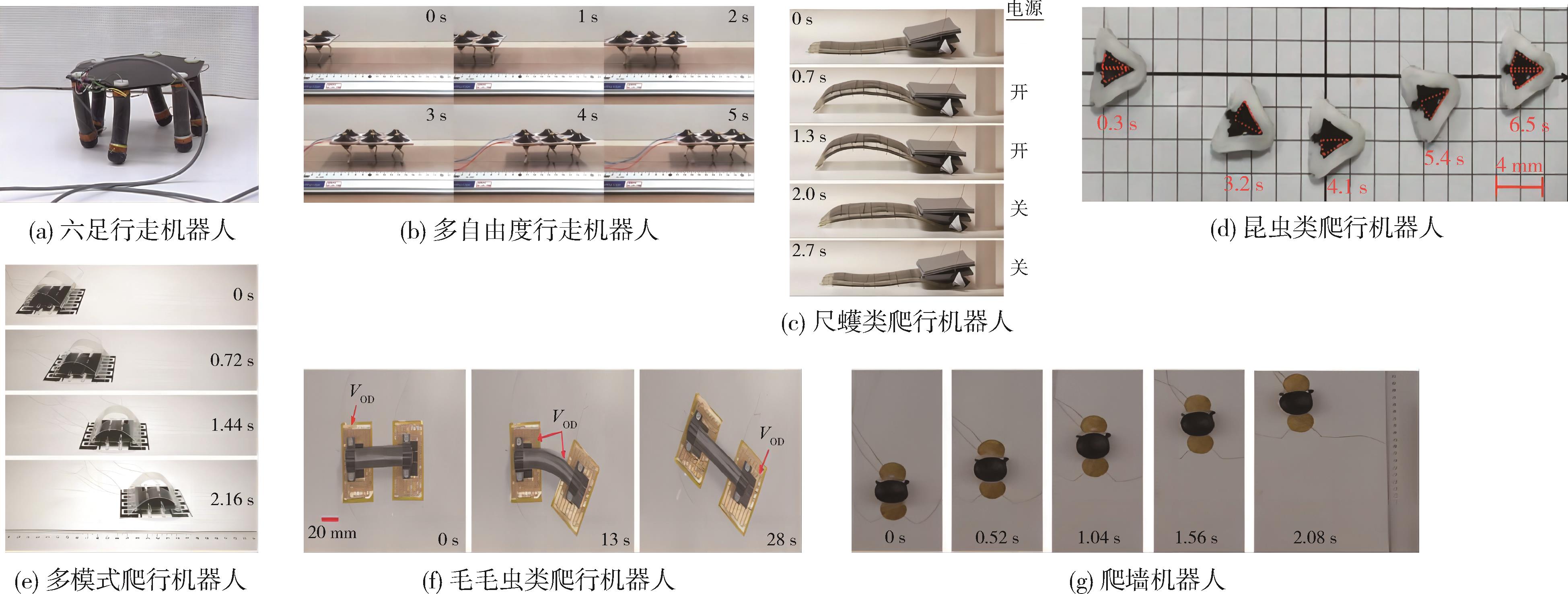
简要介绍了用于介电弹性体驱动器的不同种类材料,总结了国内外介电弹性体驱动器的不同构型研究进展,详细阐述了介电弹性体驱动器在柔性机器人领域中的应用进展。此外,还指出了在实际应用中仍然存在的问题,并展望了未来的研究前景。
中图分类号:
俞红锂, 刘茜. 介电弹性体驱动器在柔性机器人中的研究进展[J]. 中国塑料, 2023, 37(10): 144-152.
YU Hongli, LIU Qian. Research progress in dielectric elastomer actuators for soft robots[J]. China Plastics, 2023, 37(10): 144-152.











| 1 | Carpi F, Bauer S, De Rossi D. Stretching dielectric elastomer performance[J]. Science, 2010, 330(6012): 1 759⁃1 761. |
| 2 | Chen S, Cao Y, Sarparast M, et al. Soft crawling robots: design, actuation, and locomotion[J]. Advanced Materials Technologies, 2020, 5(2): 1900837. |
| 3 | Pelrine R, Kornbluh R, Pei Q, et al. High⁃speed electrically actuated elastomers with strain greater than 100%[J]. Science, 2000, 287(5454): 836⁃839. |
| 4 | Zou J, Gu G. Feedforward control of the rate⁃dependent viscoelastic hysteresis nonlinearity in dielectric elastomer actuators[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2 340⁃2 347. |
| 5 | Perju E, Shova S, Opris D M. Electrically driven artificial muscles using novel polysiloxane elastomers modified with nitroaniline push–pull moieties[J]. ACS Applied Materials & Interfaces, 2020, 12(20): 23 432⁃23 442. |
| 6 | Bartlett M D, Fassler A, Kazem N, et al. Stretchable, high‐k dielectric elastomers through liquid‐metal inclusions[J]. Advanced Materials, 2016, 28(19): 3 726⁃3 731. |
| 7 | 邓亚峰, 周洪福, 李全来, 等.基于介电弹性体的驱动器研究进展[J].中国塑料,2021,35(11):161⁃172. |
| DENG Y F, ZHOU H F, LI Q L, et al. Research pro⁃gress in actuator based on dielectric elastomer[J].China Plastics, 2021, 35(11):161⁃172. | |
| 8 | Hau S, Rizzello G, Seelecke S. A novel dielectric elastomer membrane actuator concept for high⁃force applications[J]. Extreme Mechanics Letters, 2018, 23(1): 24⁃28. |
| 9 | Wang N, Cui C, Chen B, et al. Design of translational and rotational bistable actuators based on dielectric elastomer[J]. Journal of Mechanisms and Robotics, 2019, 11(4):041 011⁃041 019. |
| 10 | Li J, Liu L, Liu Y, et al. Dielectric elastomer spring⁃roll bending actuators: applications in soft robotics and design[J]. Soft Robotics, 2019, 6(1): 69⁃81. |
| 11 | Lai Y C, Deng J, Liu R, et al. Actively perceiving and responsive soft robots enabled by self‐powered, highly extensible, and highly sensitive triboelectric proximity‐and pressure‐sensing skins[J]. Advanced Materials, 2018, 30(28): 1801114. |
| 12 | Mitchell S K, Wang X, Acome E, et al. An easy⁃to⁃implement toolkit to create versatile and high‐performance HASEL actuators for untethered soft robots[J]. Advanced Science, 2019, 6(14): 1900178. |
| 13 | Kofod G, Wirges W, Paajanen M, et al. Energy minimization for self⁃organized structure formation and actuation[J]. Applied Physics Letters, 2007, 90(8): 081916. |
| 14 | Araromi O A, Gavrilovich I, Shintake J, et al. Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite gripper[J]. IEEE/ASME Transactions on Mechatronics, 2014, 20(1): 438⁃446. |
| 15 | Lau G K, Heng K R, Ahmed A S, et al. Dielectric elastomer fingers for versatile grasping and nimble pinching[J]. Applied Physics Letters, 2017, 110(18): 182906. |
| 16 | Shian S, Bertoldi K, Clarke D R. Dielectric elastomer based “grippers” for soft robotics[J]. Advanced Materials, 2015, 27(43): 6 814⁃6 819. |
| 17 | Shintake J, Schubert B, Rosset S, et al. Variable stiffness actuator for soft robotics using dielectric elastomer and low⁃melting⁃point alloy[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Germany: IEEE, 2015: 1 097⁃1 102. |
| 18 | Aksoy B, Shea H. Reconfigurable and latchable shape‐morphing dielectric elastomers based on local stiffness modulation[J]. Advanced Functional Materials, 2020, 30(27): 2001597. |
| 19 | Zhang M, Li G, Yang X, et al. Artificial muscle driven soft hydraulic robot: electromechanical actuation and simplified modeling[J]. Smart Materials and Structures, 2018, 27(9): 095016. |
| 20 | Cao C, Gao X, Conn A T. A magnetically coupled dielectric elastomer pump for soft robotics[J]. Advanced Materials Technologies, 2019, 4(8): 1900128. |
| 21 | Pei Q, Rosenthal M, Stanford S, et al. Multiple⁃degrees⁃of⁃freedom electroelastomer roll actuators[J]. Smart Materials and Structures, 2004, 13(5): N86. |
| 22 | Nguyen C T, Phung H, Nguyen T D, et al. Multiple⁃degrees⁃of⁃freedom dielectric elastomer actuators for soft printable hexapod robot[J]. Sensors and Actuators A: Physical, 2017, 267(1): 505⁃516. |
| 23 | Shian S, Bertoldi K, Clarke D R. Use of aligned fibers to enhance the performance of dielectric elastomer inchworm robots[C]//Electroactive Polymer Actuators and Devices (EAPAD) 2015. San Diego: SPIE, 2015, 9430: 417⁃425. |
| 24 | Li T, Zou Z, Mao G, et al. Agile and resilient insect⁃scale robot[J]. Soft Robotics, 2019, 6(1): 133⁃141. |
| 25 | Hu T, Lu X, Liu J. Inchworm‐like soft robot with multimodal locomotion using an acrylic stick⁃constrained dielectric elastomer actuator[J]. Advanced Intelligent Systems, 2023, 5(2): 2200209. |
| 26 | Guo Y, Guo J, Liu L, et al. Bioinspired multimodal soft robot driven by a single dielectric elastomer actuator and two flexible electroadhesive feet[J]. Extreme Mechanics Letters, 2022, 53(1): 101720. |
| 27 | Gu G, Zou J, Zhao R, et al. Soft wall⁃climbing robots[J]. Science Robotics, 2018, 3(25): eaat2874. |
| 28 | Pei Q, Pelrine R, Rosenthal M A, et al. Recent progress on electroelastomer artificial muscles and their application for biomimetic robots[J]. Smart Structures and Materials 2004: Electroactive Polymer Actuators and Devices (EAPAD), 2004, 5385(1): 41⁃50. |
| 29 | Dubowsky S, Kesner S, Plante J S, et al. Hopping mobility concept for search and rescue robots[J]. Industrial Robot: An International Journal, 2008, 35(3): 238⁃245. |
| 30 | Duduta M, Berlinger F C J, Nagpal R, et al. Electrically⁃latched compliant jumping mechanism based on a dielectric elastomer actuator[J]. Smart Materials and Structures, 2019, 28(9): 09LT01. |
| 31 | Luo B, Li B, Yu Y, et al. A jumping robot driven by a dielectric elastomer actuator[J]. Applied Sciences, 2020, 10(7): 2 241. |
| 32 | Jordi C, Michel S, Fink E. Fish⁃like propulsion of an airship with planar membrane dielectric elastomer actuators[J]. Bioinspiration & Biomimetics, 2010, 5(2): 026007. |
| 33 | Zhao J, Niu J, Mc Coul D, et al. A rotary joint for a flapping wing actuated by dielectric elastomers: design and experiment[J]. Meccanica, 2015, 50(11): 2 815⁃2 824. |
| 34 | Chen Y, Zhao H, Mao J, et al. Controlled flight of a microrobot powered by soft artificial muscles[J]. Nature, 2019, 575(7782): 324⁃329. |
| 35 | Chen Y F, Xu S, Ren Z, et al. Collision resilient insect⁃scale soft⁃actuated aerial robots with high agility[J]. IEEE Transactions on Robotics, 2021, 37(5): 1 752⁃1 764. |
| 36 | Godaba H, Li J, Wang Y, et al. A soft jellyfish robot driven by a dielectric elastomer actuator[J]. IEEE Robotics and Automation Letters, 2016, 1(2): 624⁃631. |
| 37 | Shintake J, Shea H, Floreano D. Biomimetic underwater robots based on dielectric elastomer actuators[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Korea: IEEE, 2016: 4 957⁃4 962. |
| 38 | Jiao Z W, Wang H Y, Luo B, et al. A BCF bionic robot fish driven by a dielectric elastomer actuator[C]//Journal of Physics: Conference Series. Singapore: IOP Publishing, 2022, 2331(1): 012010. |
| 39 | Tang Y, Qin L, Li X, et al. A frog⁃inspired swimming robot based on dielectric elastomer actuators[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Canada: IEEE, 2017: 2 403⁃2 408. |
| 40 | Li G, Chen X, Zhou F, et al. Self⁃powered soft robot in the Mariana Trench[J]. Nature, 2021, 591(7848): 66⁃71. |
| 41 | Picardi G, Chellapurath M, Iacoponi S, et al. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance[J]. Science Robotics, 2020, 5(42): eaaz1012. |
| 42 | Kovacs G, Lochmatter P, Wissler M. An arm wrestling robot driven by dielectric elastomer actuators[J]. Smart Materials and Structures, 2007, 16(2): S306. |
| 43 | Lu T, Shi Z, Shi Q, et al. Bioinspired bicipital muscle with fiber⁃constrained dielectric elastomer actuator[J]. Extreme Mechanics Letters, 2016, 6(1): 75⁃81. |
| 44 | Duduta M, Hajiesmaili E, Zhao H, et al. Realizing the potential of dielectric elastomer artificial muscles[J]. Proceedings of the National Academy of Sciences, 2019, 116(7): 2 476⁃2 481. |
| 45 | Carpi F, De Rossi D. Bioinspired actuation of the eyeballs of an android robotic face: concept and preliminary investigations[J]. Bioinspiration & biomimetics, 2007, 2(2): S50. |
| 46 | Wang Y, Zhu J. Artificial muscles for jaw movements[J]. Extreme Mechanics Letters, 2016, 6(1): 88⁃95. |
| 47 | Li L, Godaba H, Ren H, et al. Bioinspired soft actuators for eyeball motions in humanoid robots[J]. IEEE/ASME Transactions on Mechatronics, 2018, 24(1): 100⁃108. |
| 48 | Lee H S, Phung H, Lee D H, et al. Design analysis and fabrication of arrayed tactile display based on dielectric elastomer actuator[J]. Sensors and Actuators A: Physical, 2014, 205(1): 191⁃198. |
| 49 | Marette A, Poulin A, Besse N, et al. Flexible zinc–tin oxide thin film transistors operating at 1kv for integrated switching of dielectric elastomer actuators arrays[J]. Advanced Materials, 2017, 29(30): 1700880. |
| 50 | Mun S, Yun S, Nam S, et al. Electro⁃active polymer based soft tactile interface for wearable devices[J]. IEEE Transactions on Haptics, 2018, 11(1): 15⁃21. |
| 51 | Yun S, Park S, Park B, et al. A soft and transparent visuo⁃haptic interface pursuing wearable devices[J]. IEEE Transactions on Industrial Electronics, 2019, 67(1): 717⁃724. |
| 52 | Ji X, Liu X, Cacucciolo V, et al. Untethered feel‐through haptics using 18‐µm thick dielectric elastomer actuators[J]. Advanced Functional Materials, 2021, 31(39): 2006639. |
| 53 | Zhao H, Hussain A M, Israr A, et al. A wearable soft haptic communicator based on dielectric elastomer actuators[J]. Soft Robotics, 2020, 7(4): 451⁃461. |
| [1] | 俞红锂 刘茜. 介电弹性体驱动器在柔性机器人中的研究进展[J]. , 2023, 37(10): 144-152. |
| [2] | 张梦欣, 刘让同, 李亮, 李淑静, 刘淑萍. 聚氨酯掺杂铜粉涂层的电磁特征及其涂层织物的吸波性能[J]. 中国塑料, 2022, 36(9): 46-52. |
| [3] | 邓亚峰, 周洪福, 李全来, 李建. 基于介电弹性体的驱动器研究进展[J]. 中国塑料, 2021, 35(11): 161-172. |
| [4] | 辛长征 王琳艳 王静 吴金鸽 田晓靖. 聚丙烯/铜金粉复合材料的制备及其性能分析[J]. 中国塑料, 2019, 33(8): 6-11. |
| [5] | 任小龙, 汪英, 冯俊杰. 低介电常数聚酰亚胺薄膜研究进展[J]. 中国塑料, 2015, 29(08): 17-24 . |
| [6] | 周文英 于德梅. 混杂铝粒子对环氧树脂导热性能与介电性能的影响[J]. 中国塑料, 2011, 25(01): 65-70 . |
| [7] | 周文英 左晶 任文娥. 高介电常数高分子复合材料的研究进展[J]. 中国塑料, 2010, 24(02): 6-10 . |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
京公网安备11010802034965号
京ICP备13020181号-2