







 京公网安备11010802034965号
京ICP备13020181号-2
京公网安备11010802034965号
京ICP备13020181号-2
《中国塑料》编辑部 ©2008-2024 版权所有
地址:北京市海淀区阜成路11号 邮编:100048
编辑部:010-68985541 联系信箱:cp@plaschina.com.cn
广告部/发行部:010-68985253 本系统由北京玛格泰克科技发展有限公司设计开发

中国塑料 ›› 2021, Vol. 35 ›› Issue (10): 92-98.DOI: 10.19491/j.issn.1001-9278.2021.10.016
吴虎1( ), 李鑫宁1, 杨先海1(), 杨立勇2
), 李鑫宁1, 杨先海1(), 杨立勇2
WU Hu1(), LI Xinning1, YANG Xianhai1(), YANG Liyong2
摘要:
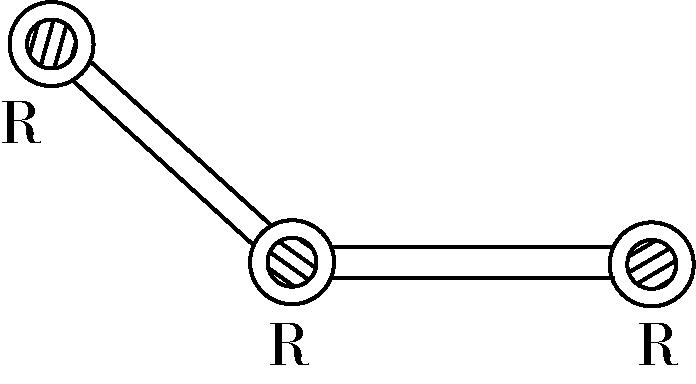
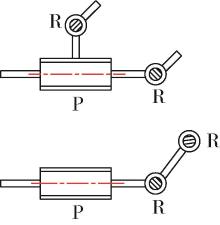
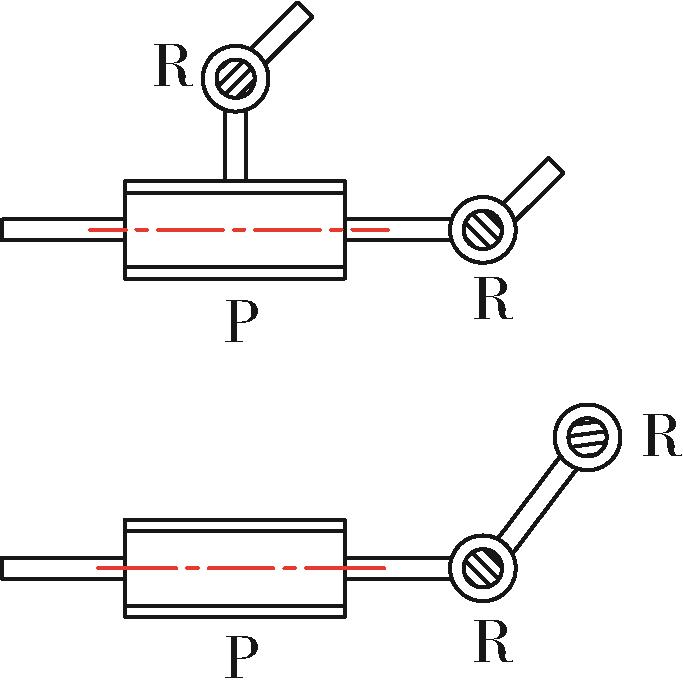
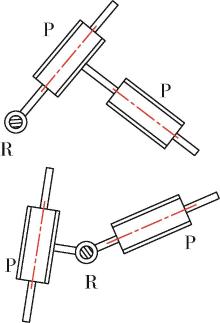
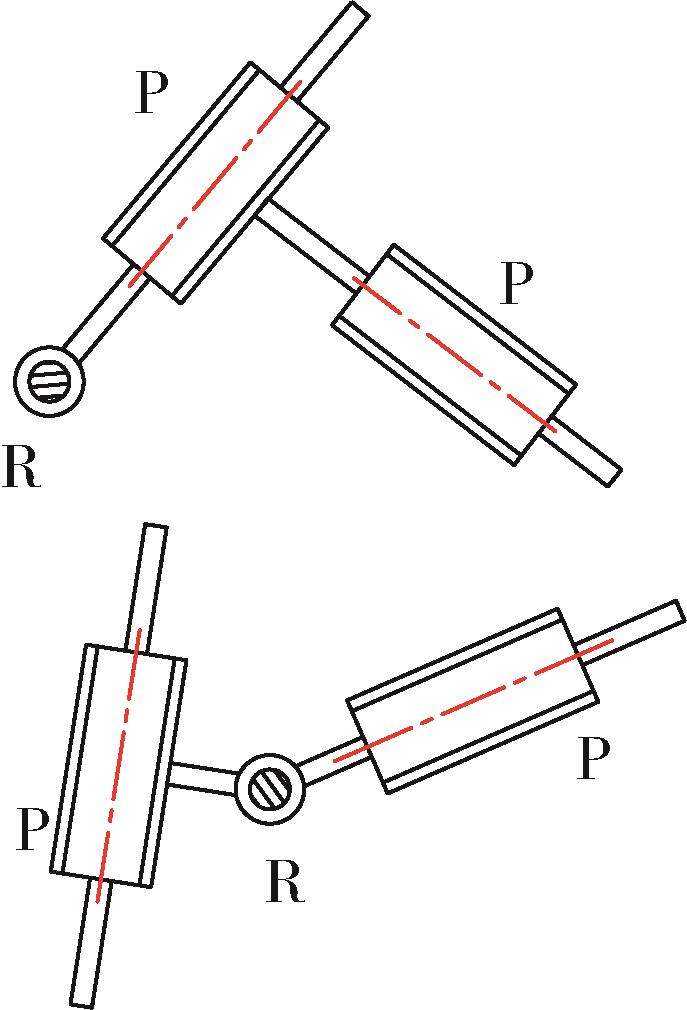
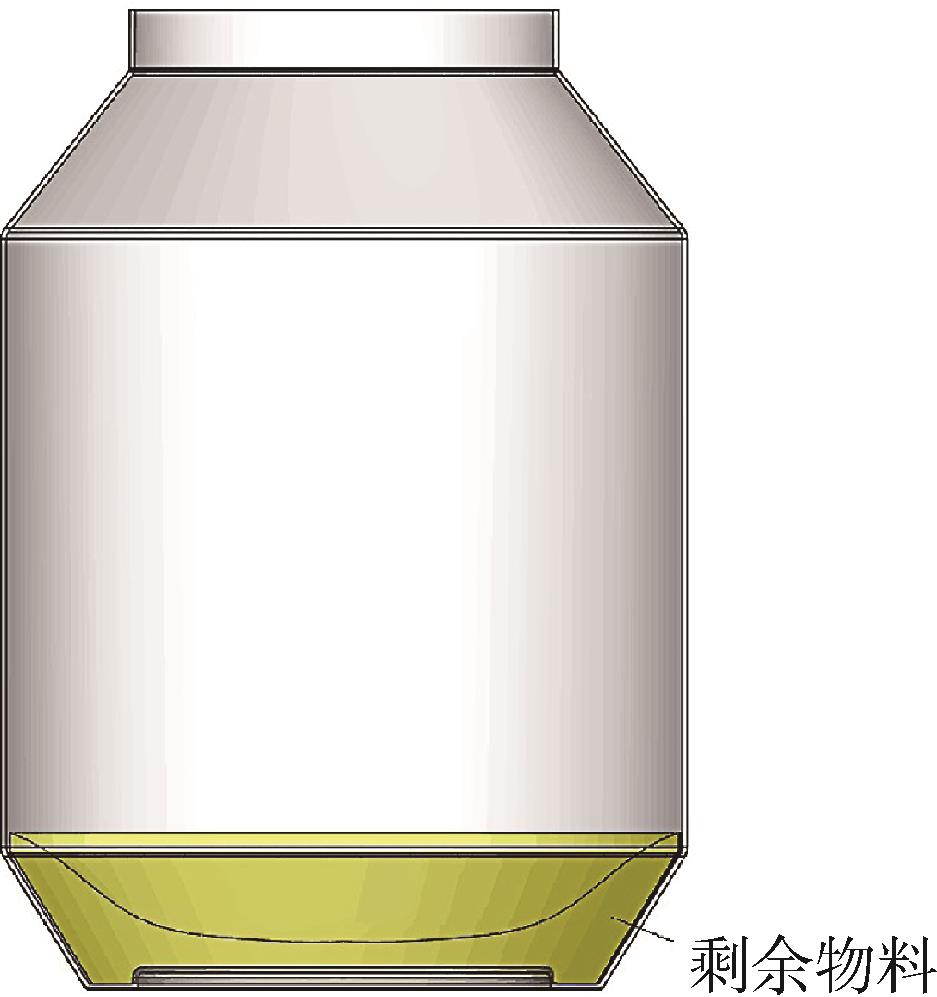
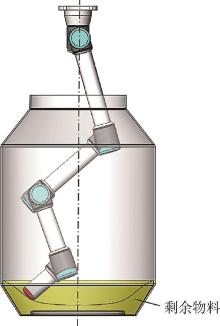
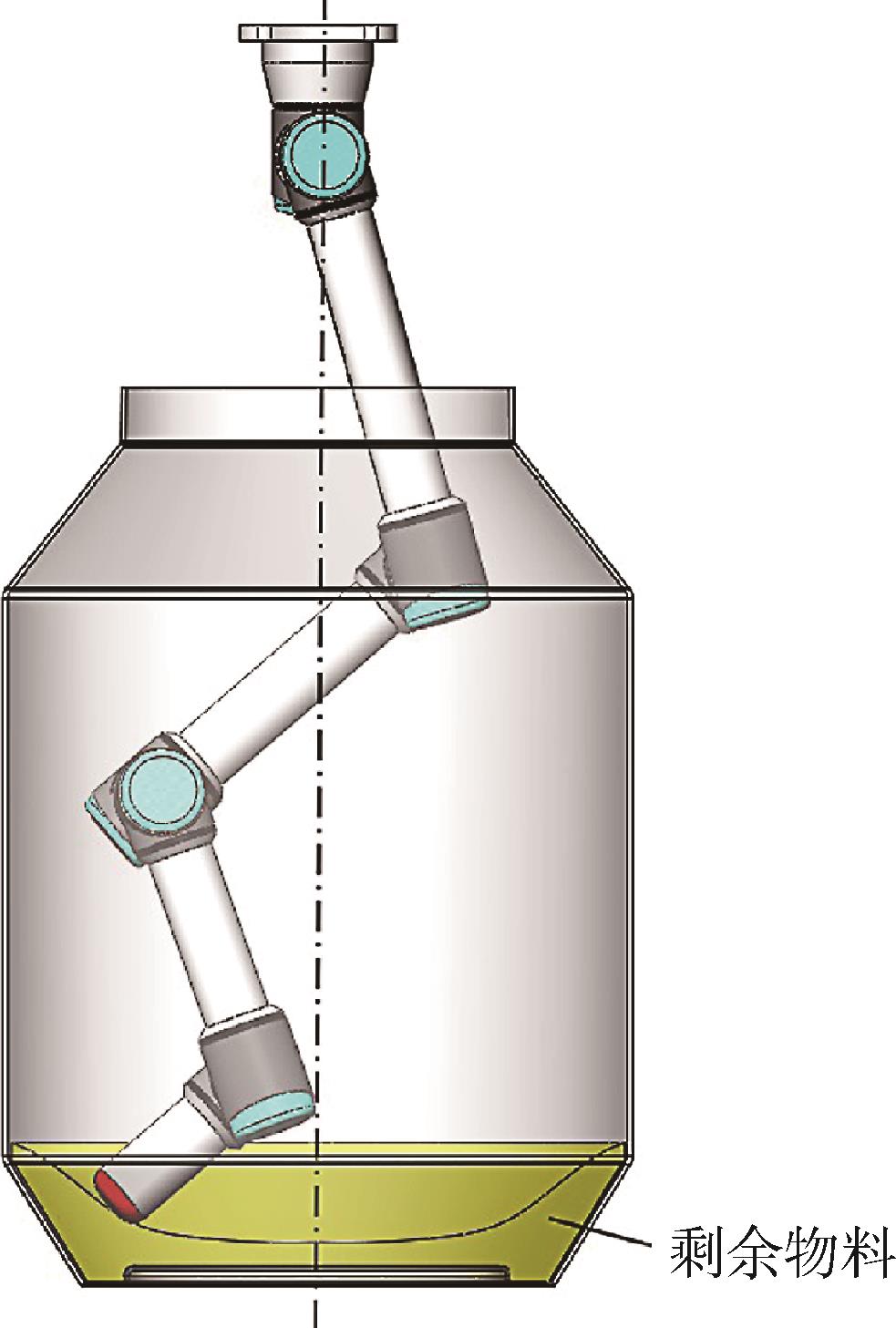
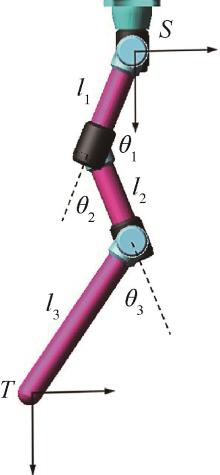
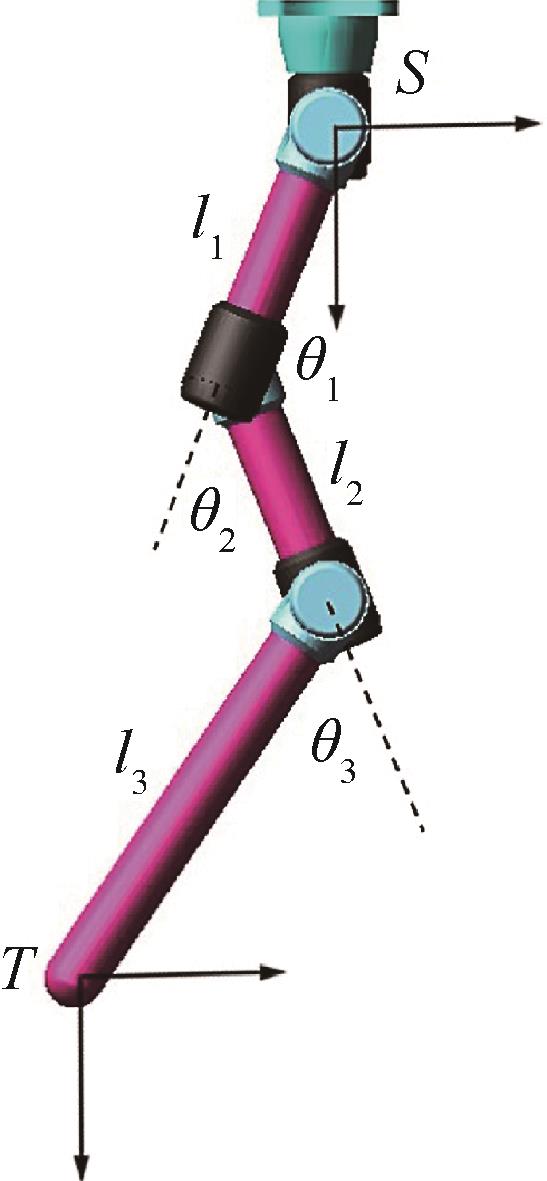
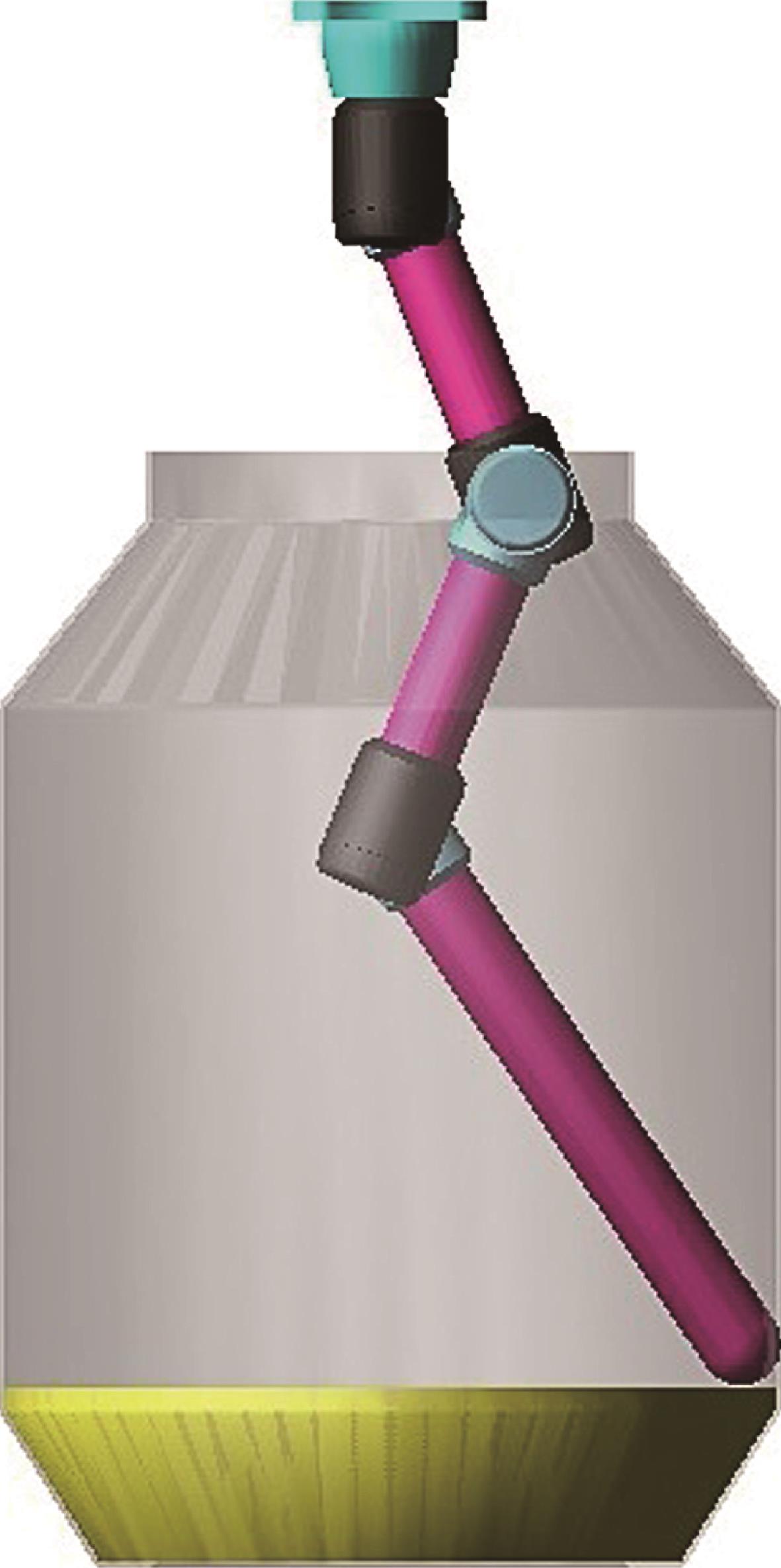
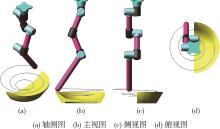
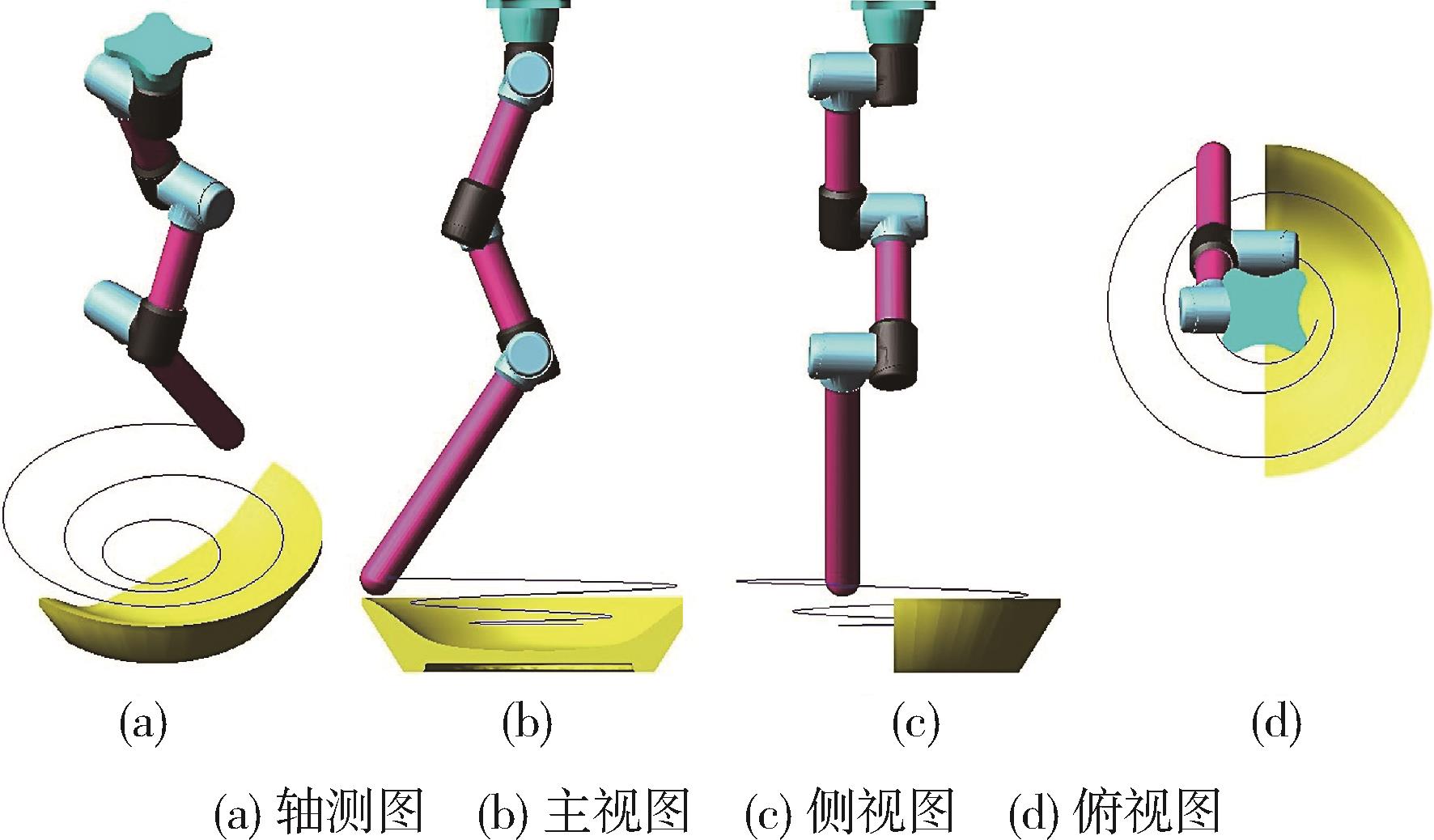
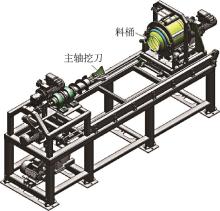
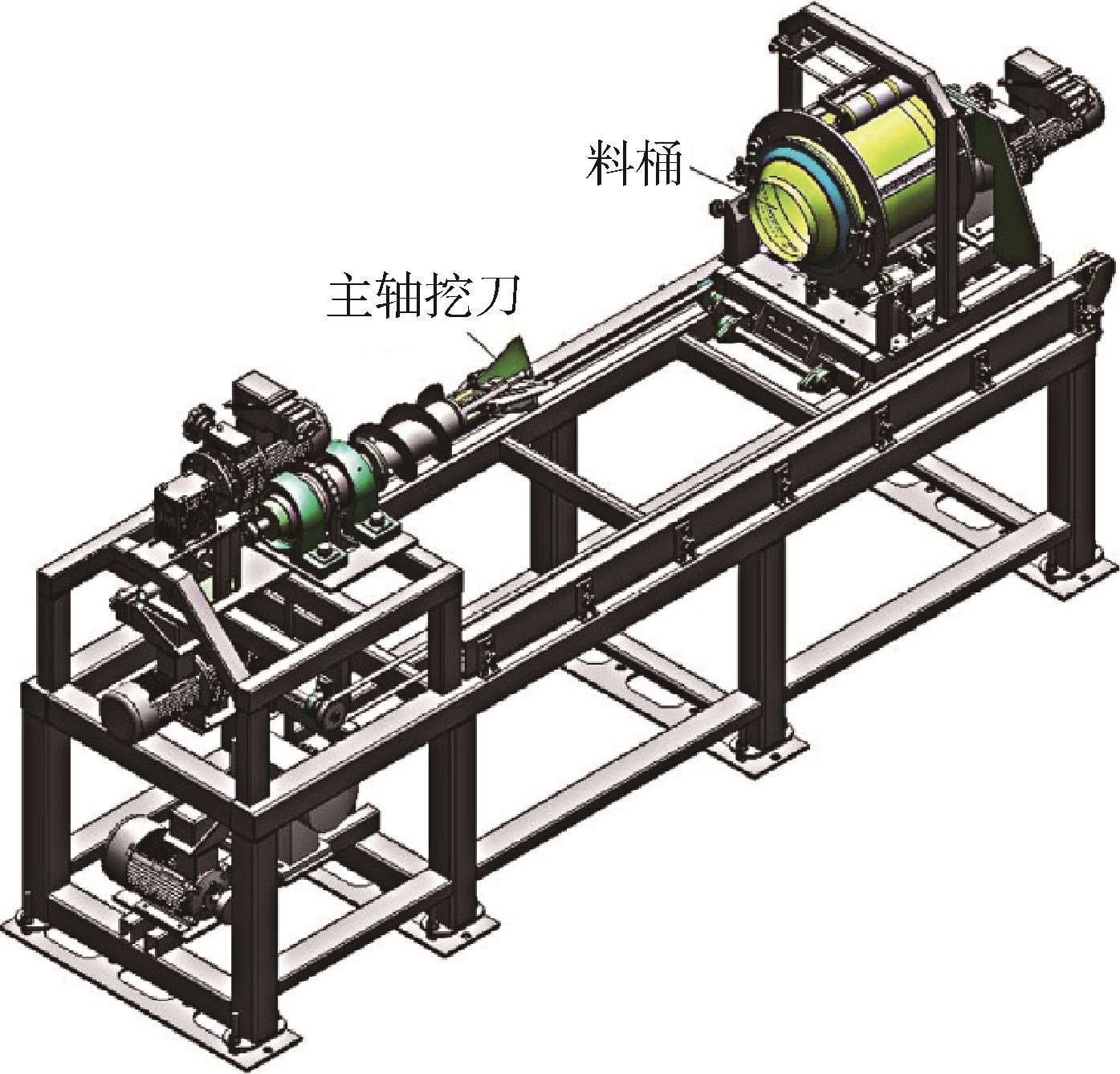
针对偶氮二异庚腈(ABVN)物理加工方案存在的问题,提出了采用连杆机器人对料筒底部剩余物料进行破碎的解决方法,基于李群李代数理论设计了连杆机器人构型,生成了多种等效运动链,并对其进行了优选。结果表明,选用RRR型连杆机器人进行加工为最优物理加工方案;RRR型连杆机器人结构简单,便于制造,打散剩余物料时运行稳定;采用已有方案、RRP型、RPP型和RRR型方案进行破碎分别需要127.1、129.1、143.1、109.6 s,RRR型方案与已有方案相比可以节省大约13.77 %的加工时间。
中图分类号:
京公网安备11010802034965号
京ICP备13020181号-2