京ICP备13020181号-2
© 《China Plastics》
© 《China Plastics》

China Plastics ›› 2021, Vol. 35 ›› Issue (10): 92-98.DOI: 10.19491/j.issn.1001-9278.2021.10.016
• Processing and Application • Previous Articles Next Articles
WU Hu1( ), LI Xinning1, YANG Xianhai1(), YANG Liyong2
), LI Xinning1, YANG Xianhai1(), YANG Liyong2
Received:2021-05-25
Online:2021-10-26
Published:2021-10-27
CLC Number:
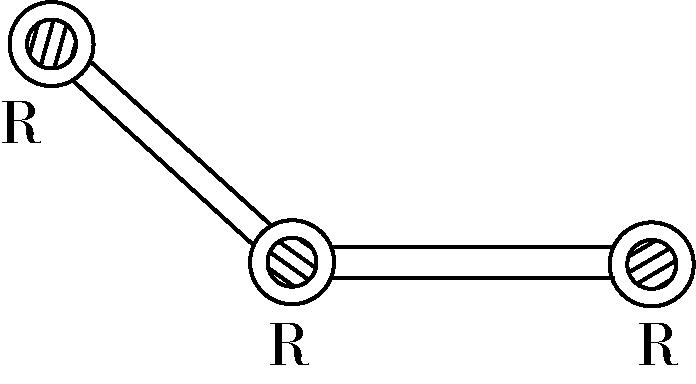
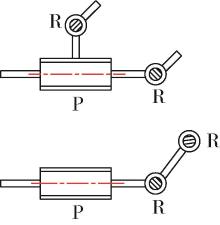
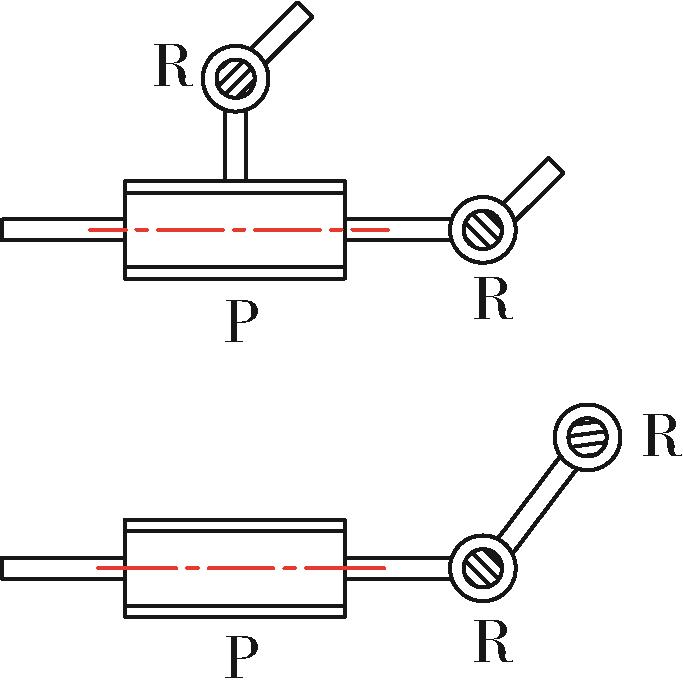
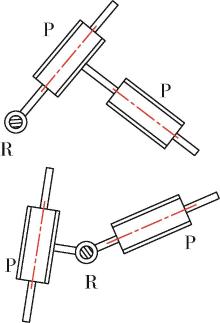
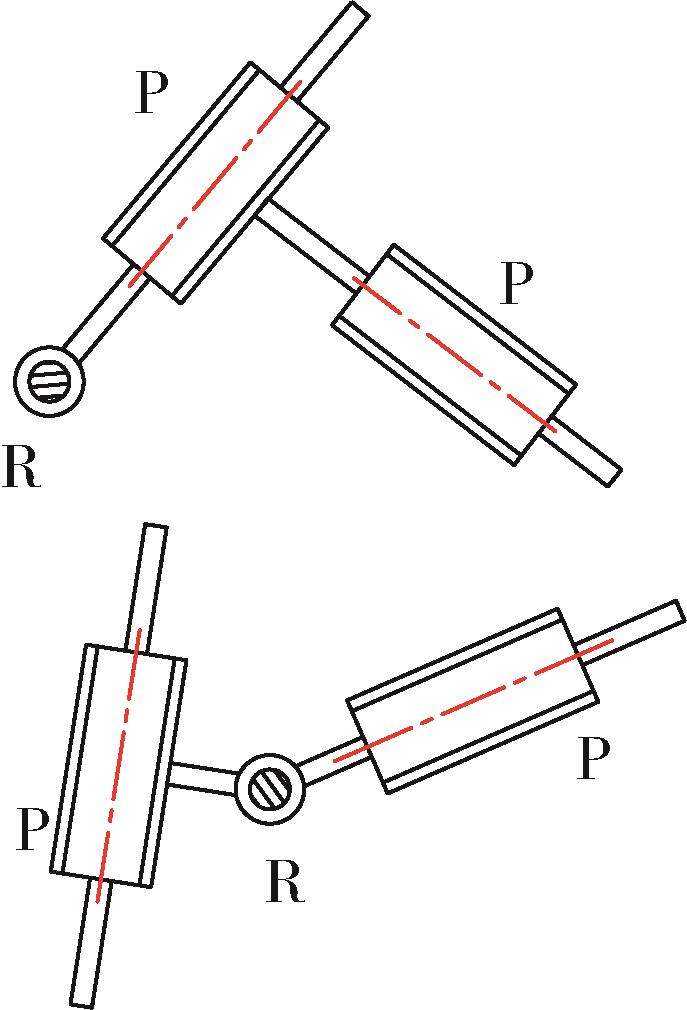
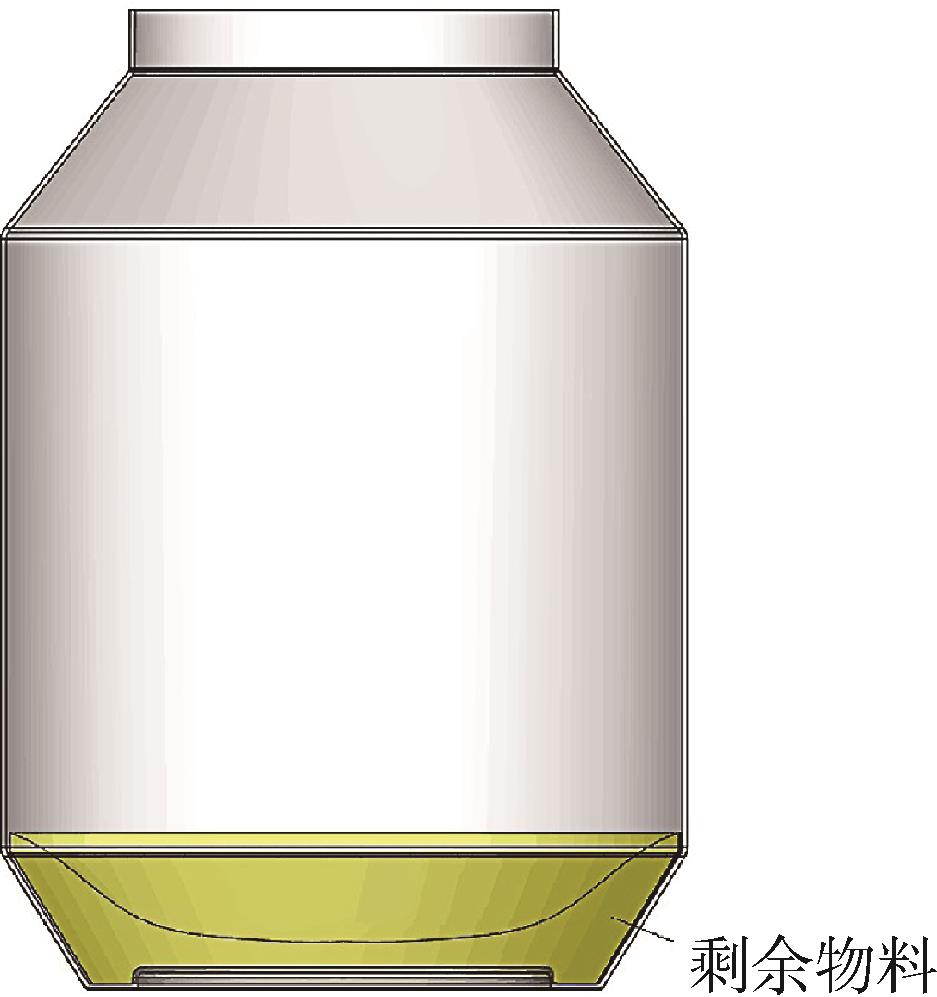
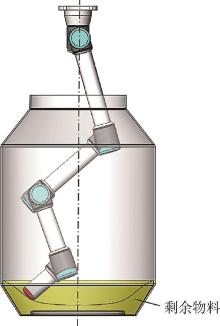
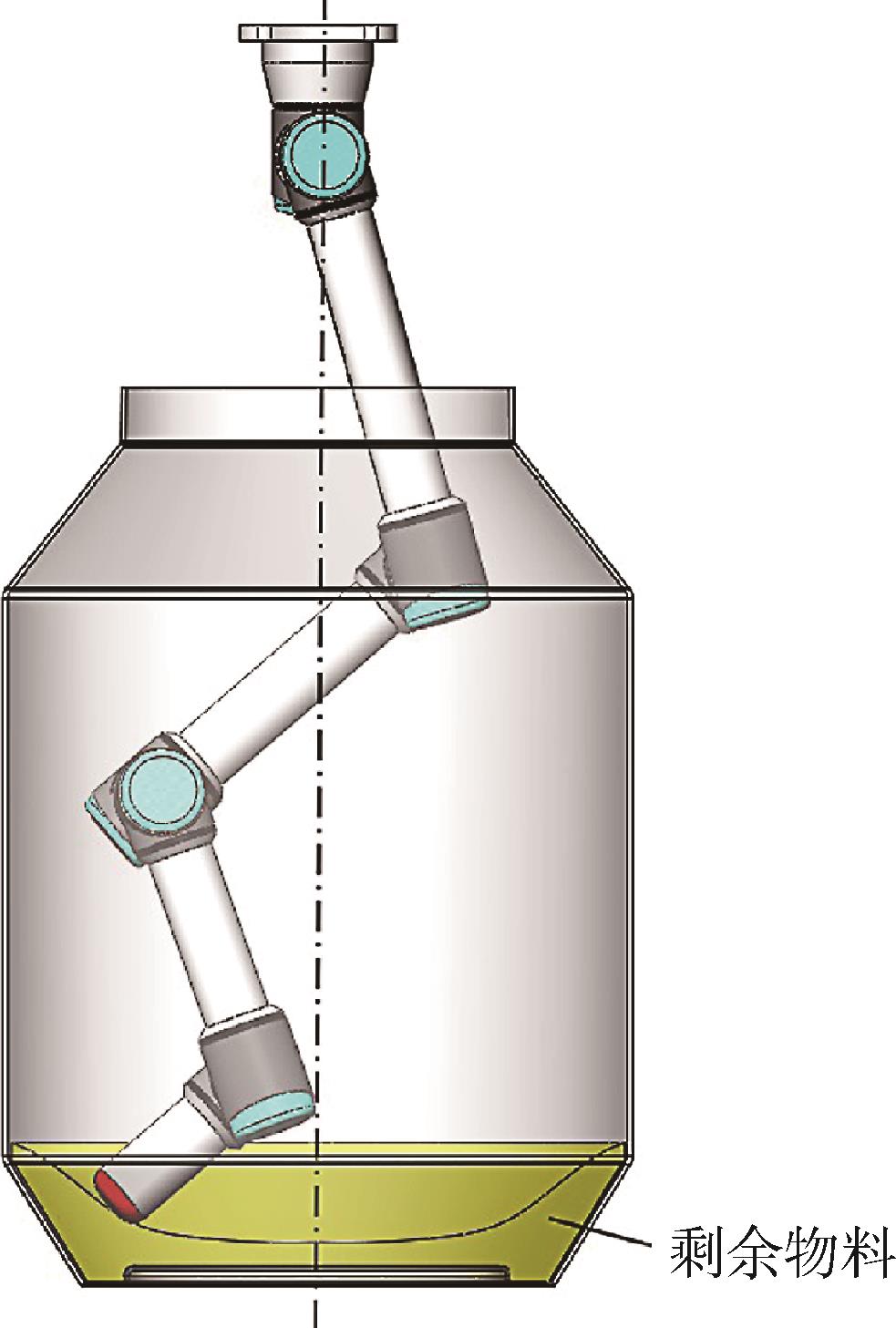
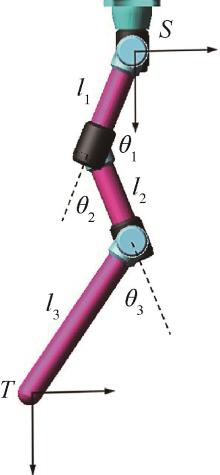
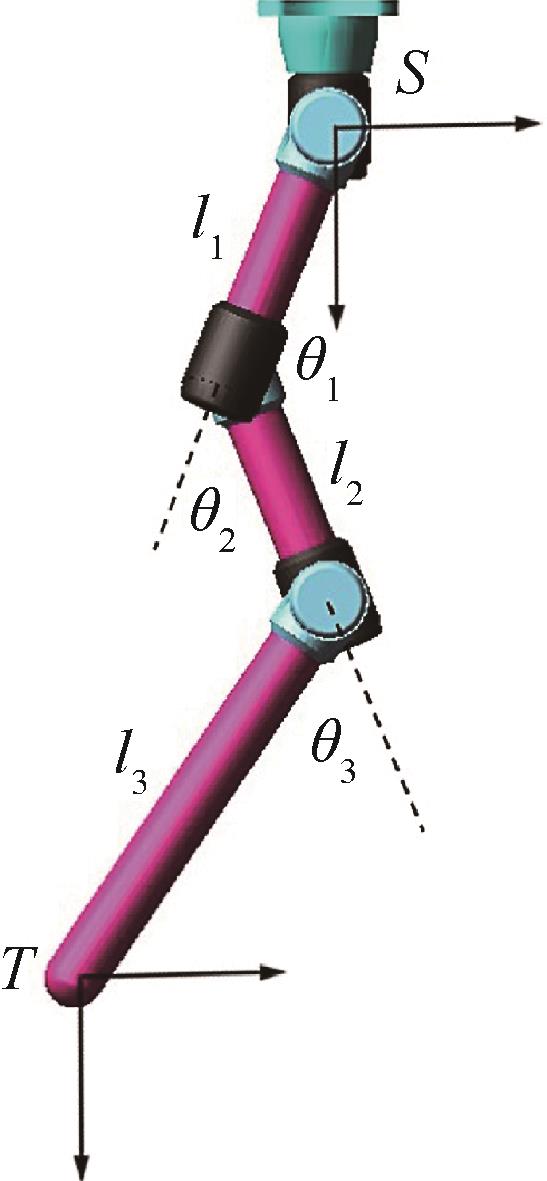
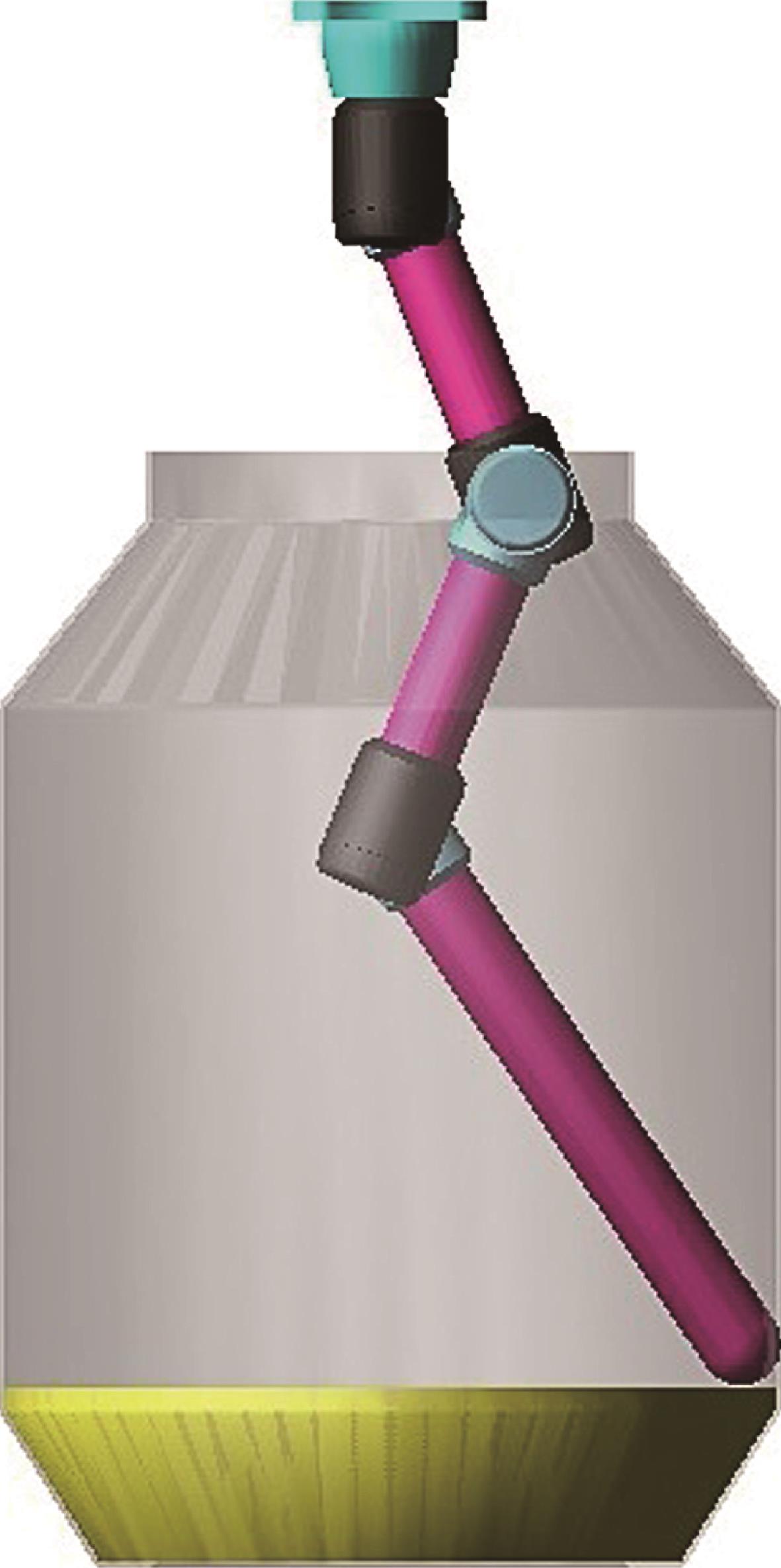
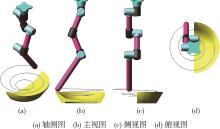
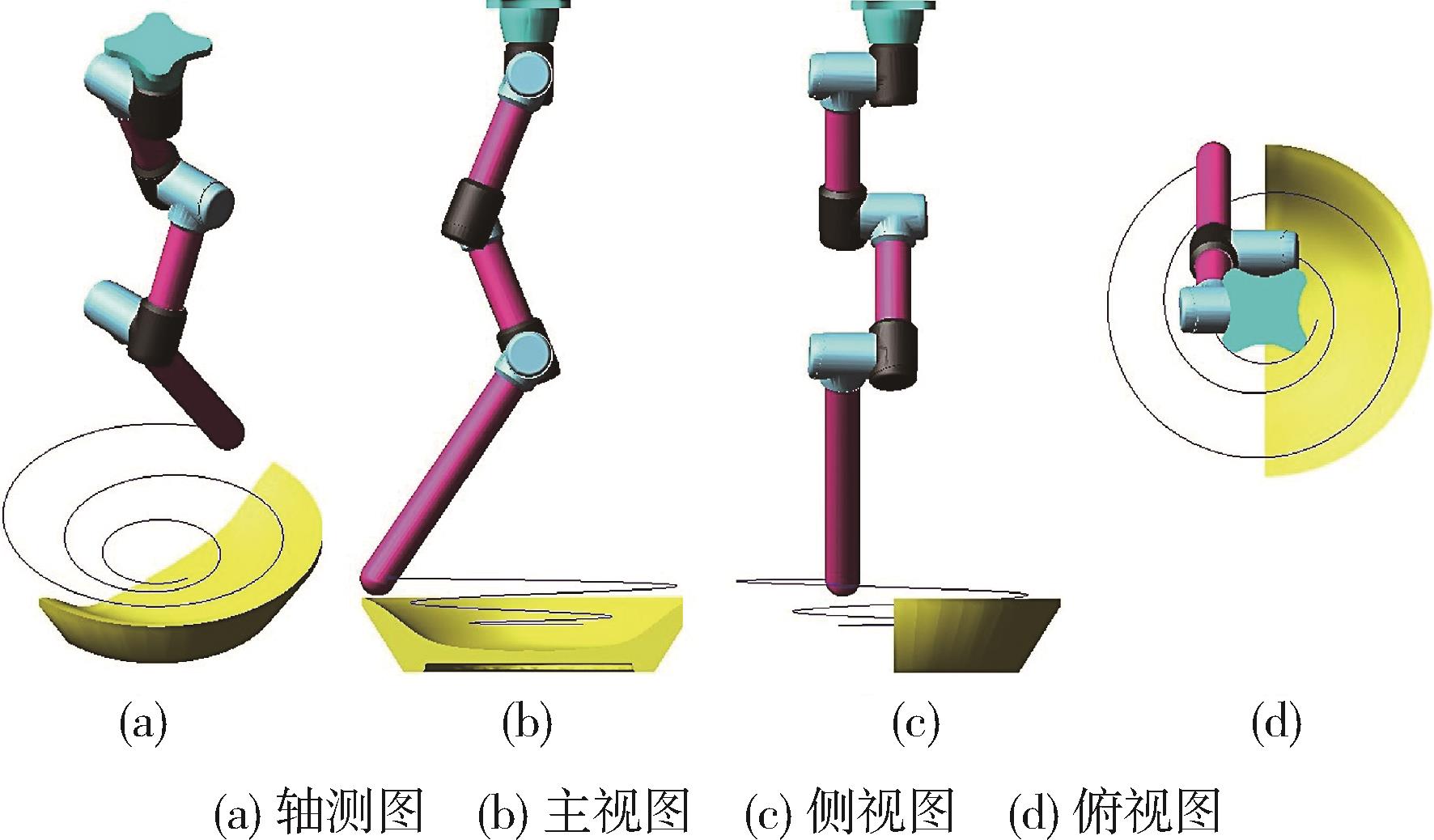
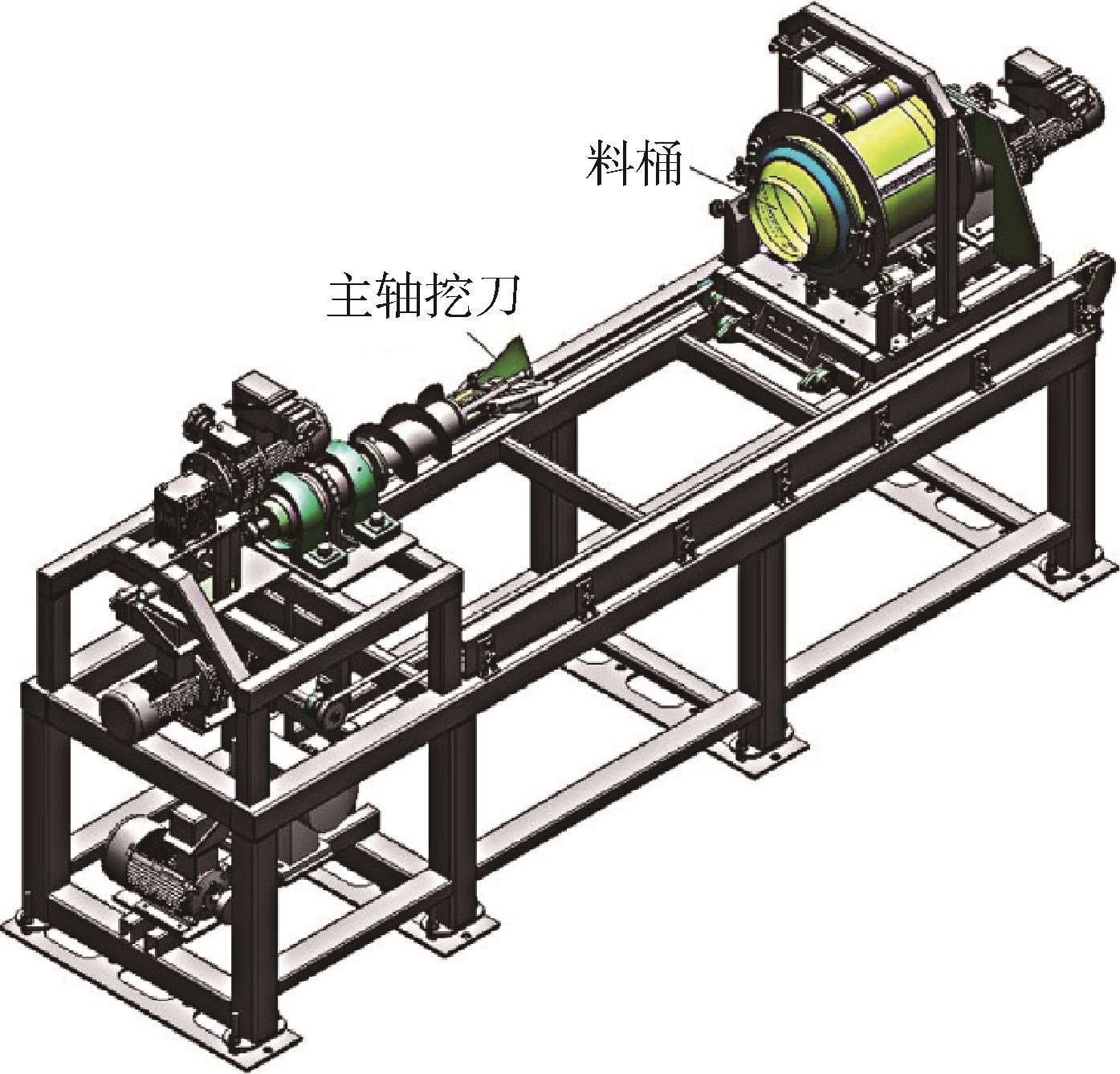
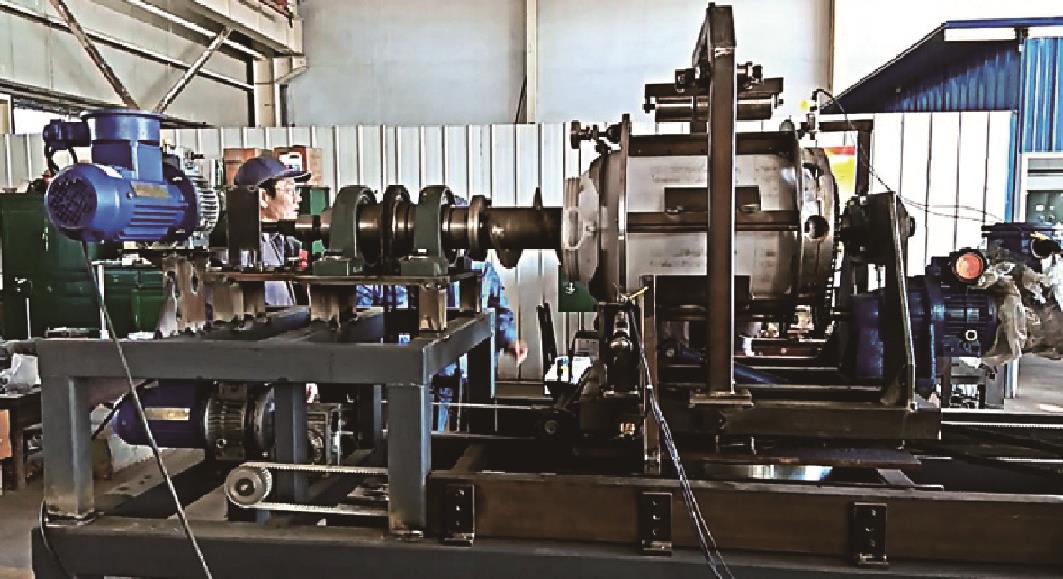
WU Hu, LI Xinning, YANG Xianhai, YANG Liyong. Study on Crushing Protocol of 2,2′⁃Azobisisoheptonitrile Based on Configuration Theory of Multi⁃linkage Robot[J]. China Plastics, 2021, 35(10): 92-98.






| 加工桶数 | 已有方案 加工时间/s | RRR型 加工时间/s | RRP型 加工时间/s | RPP型 加工时间/s |
|---|---|---|---|---|
| 第1桶 | 125 | 112 | 132 | 142 |
| 第2桶 | 127 | 108 | 133 | 143 |
| 第3桶 | 119 | 106 | 129 | 144 |
| 第4桶 | 122 | 107 | 128 | 149 |
| 第5桶 | 143 | 111 | 126 | 145 |
| 第6桶 | 125 | 108 | 131 | 146 |
| 第7桶 | 126 | 110 | 130 | 140 |
| 第8桶 | 121 | 113 | 130 | 139 |
| 第9桶 | 139 | 109 | 127 | 142 |
| 第10桶 | 124 | 112 | 125 | 141 |
| 加工桶数 | 已有方案 加工时间/s | RRR型 加工时间/s | RRP型 加工时间/s | RPP型 加工时间/s |
|---|---|---|---|---|
| 第1桶 | 125 | 112 | 132 | 142 |
| 第2桶 | 127 | 108 | 133 | 143 |
| 第3桶 | 119 | 106 | 129 | 144 |
| 第4桶 | 122 | 107 | 128 | 149 |
| 第5桶 | 143 | 111 | 126 | 145 |
| 第6桶 | 125 | 108 | 131 | 146 |
| 第7桶 | 126 | 110 | 130 | 140 |
| 第8桶 | 121 | 113 | 130 | 139 |
| 第9桶 | 139 | 109 | 127 | 142 |
| 第10桶 | 124 | 112 | 125 | 141 |


| 1 | 钟晓萍.2017~2018年世界塑料工业进展(Ι)[J].塑料工业,2019,47 (3):1⁃7,46. |
| ZHONG X P. Progress of the World’s Plastics Industry from 2017 to 2018 (Ι)[J]. China Plastics Industry,2019, 47(3):1⁃7,46. | |
| 2 | 宁 军.2018~2019年世界塑料工业进展(Ι)[J].塑料工业,2020,48(3):1⁃14. |
| NING J. Progress of the World’s Plastics Industry from 2018 to 2019 (Ι)[J]. China Plastics Industry,2020, 48(3):1⁃14. | |
| 3 | 费 轶,金满平,张 帆.偶氮二异庚腈(ABVN)的安全性分析[J].安全、健康和环境,2015,15(11):42⁃46. |
| FEI Y, JIN M P, ZHANG F. Safety Analysis of ABVN[J]. Safety Health & Environment,2015,15(11):42⁃46. | |
| 4 | 郭心怡,潘惠泉,王顺尧,等.偶氮二异庚腈的热分解动力学研究[J].安全与环境工程,2019,26(4):165⁃170. |
| GUO X Y, PAN H Q, WANG S Y, et al. Study on Thermal Decomposition Kinetics of 2,2’⁃Azobisisoheptonitrile[J]. Safety and Environmental Engineering,2019,26(4):165⁃170. | |
| 5 | 刘 超.超低聚合度聚乙烯醇合成中偶氮类引发剂的研究[D].呼和浩特:内蒙古大学,2019. |
| 6 | 郭心怡. 杂质对三种偶氮类引发剂热危险性的影响研究[D].南京:南京理工大学,2019. |
| 7 | 王彬宇,李 莉,李 菁,等.用工业固体废料合成沸石分子筛的研究进展[J].高等学校化学学报,2021,42(1):40⁃59. |
| WANG B Y, LI L, LI J, et al. Recent Progresses on the Synthesis of Zeolites from the Industrial Solid Wastes[J]. Journal of Chemical Engineering of Chinese Universities, 2021,42(1):40⁃59. | |
| 8 | 殷成阳,杨 爽,毛 迪, 等.双功能模板法合成多级孔沸石分子筛的研究进展[J/OL].无机盐工业(网络首发) [2021⁃02⁃24]. |
| YIN C Y, YANG S, MAO D,et al. Research Progress in Synthesis of Hierarchical Porous Zeolites by Using Bifunctional Templates[J/OL].Inorganic Chemicals Industry.[2021⁃02⁃24] . | |
| 9 | 候东阳.大块煤破碎装置的设计与应用[J].山东煤炭科技,2020(2):111⁃117. |
| HOU D Y. Design and Application of Large Coal Crushing Device[J].Shandong Coal Science and Technology,2020(2):111⁃117. | |
| 10 | 李 景,吕宗辉.浅析大型挖掘机液压破碎锤的安装与调试[J].装备制造技术,2019(12):86⁃88. |
| LI J, LYU Z H. Analysis on Installation and Debugging of Hydraulic Breaker Hammer of Large Excavator[J].Equipment Manufacturing Technology,2019(12):86⁃88. | |
| 11 | 陈绪林,陶雪娟,陈思睿,等.液压破碎锤动臂结构仿真分析研究[J].现代制造技术与装备,2020,283(6):13⁃16. |
| CHEN X L, TAO X J, CHEN S R, et al. Study on the Simulation Design of Maneuver Arm Structural[J]. Modern Manufacturing Technology and Equipment,2020,283(6):13⁃16. | |
| 12 | SELIG J M. Geometry Foundations in Robotics[M]. Hong Kong: World Scientific Publishing Co. Pte. Ltd., 2000:7⁃12. |
| 13 | 于靖军,刘辛军,丁希仑.机器人机构学的数学基础[M].北京:机械工业出版社,2016:11⁃13,20⁃26. |
| 14 | 郝军杰,郭 成,高翔鹏,等.甘蔗渣活性炭的制备及应用研究进展[J].现代化工,2021,41(3):31⁃35. |
| HAO J J, GUO C, GAO X P, et al. Advances on Synthesis and Application of Bagasse⁃based Activated Carbon[J]. Modern Chemical Industry, 2021,41(3):31⁃35. | |
| 15 | WU H, LI X, YANG X. Dimensional Synthesis for Multi⁃Linkage Robots Based on a Niched Pareto Genetic Algorithm[J]. Algorithms,2020,13(9):203. |
| [1] | FENG Bingtao, WANG Xiaoke, ZHANG Xin, SUN Guohua, WANG Dianlong, HOU Lianlong, MA Jinsong. Preparation and application of continuous carbon⁃fiber⁃reinforced thermoplastic composites [J]. China Plastics, 2022, 36(7): 165-173. |
| [2] | GUO Yuwen, ZENG Bei, GAO Xing, WANG Pan, REN Lianhai. Effect of PET microplastics on performance of co⁃digestion of sewage sludges and food wastes [J]. China Plastics, 2022, 36(7): 51-60. |
| [3] | LI Kaize, XIN Yong. Properties of thermoplastic polyurethane composites modified with carbon nanotubes [J]. China Plastics, 2022, 36(6): 1-5. |
| [4] | MA Zhanfeng, NIU Guoqiang, LU Shan. China plastics industry (2021) [J]. China Plastics, 2022, 36(6): 142-148. |
| [5] | WU Xiongjie, TAO Qiang, ZHU Dongbo, CHENG Jinsong, CHU Yu, XU Lei. Study on material identification and total migration of biodegradable plastic shopping bags used for food contact [J]. China Plastics, 2022, 36(5): 127-132. |
| [6] | LEI Jingfa, SHEN Qiang, LIU Tao, SUN Hong, YIN Zhiqiang. Influence of fused deposition process parameters on static and dynamic mechanical properties of thermoplastic polyurethane elastomer [J]. China Plastics, 2022, 36(5): 29-35. |
| [7] | WAN Yi, LI Li, JU Chunyan, HAO Xuechun, LI Run. Prediction of annual output of plastic waste in urumqi city and analysis of influence factors [J]. China Plastics, 2022, 36(4): 121-127. |
| [8] | PENG Jing, XIAO Da, WU Yingjiang, LI Bing, ZHANG Long, LI Zegang. Comparative analysis of Chinese and international standards for plastics structured⁃wall drainpipes [J]. China Plastics, 2022, 36(4): 135-141. |
| [9] | TAN Lei, HUANG Xingyuan, WANG Han, PAN Liuwen. Analysis of temperature field in melting chamber of hot⁃air melting waste plastic granulator [J]. China Plastics, 2022, 36(4): 149-157. |
| [10] | LI Suyuan, LIU Huipeng, GONG Shun, HUANG Guotao, LI Yucai, WU Xin, DENG Jianping, PAN Kai. Preparation and characterization of EVA foaming materials modified with thermoplastic polyamide elastomer [J]. China Plastics, 2022, 36(4): 6-14. |
| [11] | LI Jinglin, ZHENG Yi, ZHAO Liya, WANG Pan, YANG Xinyu, REN Lianhai. Research progress in biosynthesis of polyhydroxyalkanoates from kitchen waste [J]. China Plastics, 2022, 36(3): 110-119. |
| [12] | ZENG Congqin, PAN Wei, ZOU Yaobang. Effect of air pollutants NOx on plastic packaging materials for liquor [J]. China Plastics, 2022, 36(3): 127-133. |
| [13] | LI Zeyang, CEN Lan, CHEN Sheng, CHEN Weijie, DU Binghua, ZHANG Ershuai. Preparation and properties of XNBR/PA12 thermoplastic elastomer [J]. China Plastics, 2022, 36(3): 15-20. |
| [14] | HU Huanbo, WU Wei, LI Ning, ZHAO Tianyu, ZOU Zhiqiang. Preparation and properties of TPEE/P(AA⁃co⁃AM) water absorbent elastomer [J]. China Plastics, 2022, 36(3): 9-14. |
| [15] | MA Jiasen, XUE Yongbing, GUO Qi, LIU Zhenmin. Research progress in waste plastic⁃modified asphalts [J]. China Plastics, 2022, 36(2): 131-138. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||